





מה מהפך?
המהפך ממיר כוח DC (סוללה, סוללת אחסון) לחשמל AC (בדרך כלל 220 וולט, גל סינוס 50 הרץ). זה מורכב מגשר מהפך, היגיון בקרה ומעגל פילטר.
במילים פשוטות, מהפך הוא מכשיר אלקטרוני שממיר מתח נמוך (12 או 24 וולט או 48 וולט) זרם ישיר לזרם 220 וולט. מכיוון שאנו משתמשים בדרך כלל במיישר הזרם המתחלף עם 220 וולט כדי להפוך אותו לזרם ישיר, והמהפך פועל בכיוון ההפוך, ומכאן השם.
מה זה אמהפך גל סינוס
ניתן לסווג ממירים על פי צורות הגל הפלט שלהם, א. מחולק לממירי גל מרובעים, ב. ממירי גל שונה ו- C. ממירי גל סינוס.
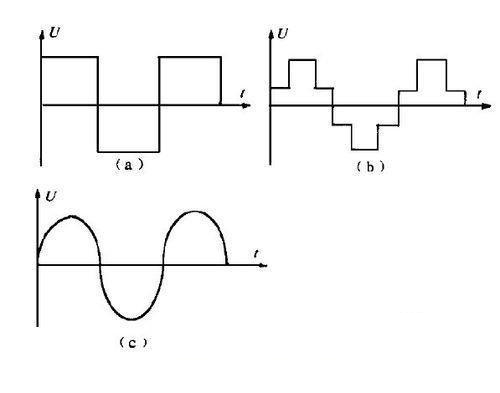
לפיכך, ההגדרה של מהפך גל סינוס היא מהפך שצורת גל הפלט שלו היא גל סינוס.
היתרון שלה הוא שצורת גל הפלט טובה, העיוות נמוך מאוד, וצורת הגל הפלט שלה תואמת בעיקר את צורת הגל AC של רשת החשמל. למעשה, איכות כוח ה- AC המסופק על ידי המצויןמהפך גל סינוסגבוה מזה של הרשת. למהפך גל הסינוס אין מעט הפרעות לרדיו, ציוד תקשורת וציוד דיוק, רעש נמוך, יכולת הסתגלות בעומס חזק, יכולה לעמוד ביישום של כל עומסי AC, ולמכונה כולה יש יעילות גבוהה; החיסרון שלו הוא שהקו והיפוך גל התיקון היחסי המהפך מורכב, יש דרישות גבוהות לשבבי בקרה וטכנולוגיית תחזוקה, והוא יקר.
איך זה עובד?
לפני שמציגים את העיקרון העובד שלמהפך גל סינוסראשית מציג את העיקרון העובד של המהפך.
המהפך הוא שנאי DC ל- AC, שהוא למעשה תהליך של היפוך מתח עם הממיר. הממיר ממיר את מתח ה- AC של רשת החשמל לפלט DC יציב 12V, ואילו המהפך ממיר את תפוקת המתח 12V DC על ידי המתאם לתדר גבוה בתדר גבוה; שני החלקים משתמשים גם בטכניקת אפנון רוחב דופק (PWM) בתדירות גבוהה יותר. חלק הליבה שלו הוא בקר משולב PWM, המתאם משתמש ב- UC3842, והמהפך משתמש בשבב TL5001. טווח המתח העובד של TL5001 הוא 3.6 ~ 40 וולט, והוא מצויד במגבר שגיאה, רגולטור, מתנד, מחולל PWM עם בקרת אזור מת, מעגל הגנה על מתח נמוך ומעגל הגנה על מעגל קצר.
חלק ממשק קלט: ישנם 3 אותות בחלק הקלט, 12V DC קלט VIN, עבודה אפשר מתח ENB ואות בקרת זרם לוח DIM. VIN מסופק על ידי המתאם, מתח ENB מסופק על ידי ה- MCU בלוח האם, ערכו הוא 0 או 3V, כאשר ENB = 0, המהפך אינו עובד, וכאשר ENB = 3V, המהפך במצב עבודה רגיל; בעוד שמתח עמום המסופק על ידי הלוח הראשי, טווח השונות שלו הוא בין 0 ל- 5V. ערכי DIM שונים מוזנים בחזרה למסוף המשוב של בקר PWM, והזרם שמספק המהפך לעומס יהיה שונה גם הוא. ככל שהערך העמום קטן יותר, כך זרם הפלט של המהפך קטן יותר. גדול יותר.
מעגל הפעלה מתח: כאשר ENB נמצא ברמה גבוהה, הוא מפעיל מתח גבוה כדי להאיר את צינור התאורה האחורית של הפאנל.
בקר PWM: הוא מורכב מהפונקציות הבאות: מתח התייחסות פנימי, מגבר שגיאות, מתנד ו- PWM, הגנה על מתח יתר, הגנה מפני מתח, הגנה מפני קצרי חשמל וטרנזיסטור פלט.
המרת DC: מעגל המרת המתח מורכב מצינור מיתוג MOS ומשרן אחסון אנרגיה. דופק הקלט מוגבר על ידי מגבר המשיכה ואז מניע את צינור ה- MOS לביצוע פעולת מיתוג, כך שמתח ה- DC מטען ומפרק את המשרן, כך שהקצה השני של המשרן יוכל לקבל מתח AC.
מעגל תנודות ופלט של LC: וודא כי מתח 1600 וולט הנדרש כדי שהמנורה תתחיל, והפחית את המתח ל 800 וולט לאחר תחילת המנורה.
משוב מתח יציאה: כאשר העומס עובד, מתח הדגימה מוזן בחזרה לייצוב פלט המתח של המהפך I.

נר תרשים מעגל גל סינוס מורכב)
ההבדל בין מהפך גל הסינוס למהפך הרגיל הוא שצורת גל הפלט שלו היא גל סינוס שלם עם קצב עיוות נמוך, כך שאין הפרעה לציוד הרדיו והתקשורת, הרעש גם הוא נמוך מאוד, פונקציית ההגנה הושלמה והיעילות הכללית גבוהה.
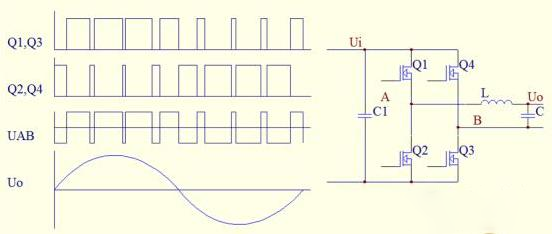
הסיבה לכךמהפך גל סינוסהאם פלט גל סינוס שלם הוא מכיוון שהוא משתמש בטכנולוגיית SPWM שהיא מתקדמת יותר מטכנולוגיית PWM.
העיקרון של SPWM מבוסס על העיקרון המקביל כי פולסים פועלים על התקני פונקציות זמן: אם הפולסים פועלים על מכשירי פונקציות זמן, תוצר ערך השיא וזמן הפעולה שווה, וניתן לקירוב פולסים אלה להיות שווה ערך.
SPWM משווה את הגל המשולש לתדר קבוע וערך שיא קבוע (כגון תדר מיתוג 10K) עם גל הסינוס ההתייחסות (גל בסיסי) של תדר ומתח משתנה, כדי לדופק את מתח ה- DC (דופק עם מחזור חובה) כדי לקירוב גל סינוס ההתייחסות במכשיר. המשרעת ותדירות גל הסינוס ההתייחסות מותאמים ליצירת גלי אפנון רוחב מתח מתח DC דופק השווים לגל סינוס ההתייחסות עם אמפליטודות ותדרים שונים.
זמן ההודעה: פברואר -05-2024

